20 August, 1997 6:00 pm Pacific Daylight Time (GMT -7 hrs.) Sol 45-47 Description of Planned Rover Operations for Sol 45: Today we drive across the Martian surface towards Shark (and hopefully far far far away from Wedge) to take its picture and see if Shark is a good target for APX analysis.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 42-43
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 40-41
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 34-37
Summary of Planned Rover Activities for Sol 37:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 33-34
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 31-32 There were no rover activities today. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 29-30
Summary of Planned Rover Activities for Sol30:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 27-28
Summary of Planned Rover Activities for Sol 28:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 26-27
Summary of Planned Rover Activities for Sol 27:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 25-26 Description of Planned Rover Operations for Sol 27: Driving, driving, driving! Summary of Planned Rover Activities for Sol 27:
Does this sequence look a lot like yesterday's plan? Here's why: A sequencing transmission error prevented the rover from executing its daily traverse, Jennifer Harris, Mars Pathfinder Flight Director, said. The situation was quickly corrected and the rover was able to complete an accelerometer diagnosis sequence, which involved making a 120- degree turn in place. Sojourner will complete its traverse to the rock nicknamed Mini Matterhorn (62K) tomorrow and then turn to image the lander (171K) The end-of-day image with the windsocks in the foreground. Piglet and Pooh Bear are just to the left and in front of the rover. The view from Sojourner! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 24-25 Description of Planned Rover Operations for Sol 25: Even more driving! Summary of Planned Rover Activities for Sol 25:
Over a small obstacle. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 22-23 On to open country. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 20-21 sol21l.gif (78K) sol21r.gif (171K) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
sol18l.gif (93K) Sol 17-19 Today the Sojourner left the vicinity of Scooby-Doo travelling approximately 2 meters to the west. A soil experiment was performed at the end of the traverse and images of the site from the rover were successfully received. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 15-17 The rover remains safely at the rock called Scooby Doo. Earth will rise over the Sagan Memorial Station at 8:07 p.m. PDT today July 20, and sunrise will be at 11:15 p.m. Earth set is at 9:45 a.m. July 21. Two New Rover "Movies (17-18 July 1997)! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 14 It was a picture perfect day today on Mars as the Sojourner microrover repositined itself directly over the rock (or possibly a Soil Patch) known as "Scooby-Doo" and deployed the APXS instrument to its surface. The placement of the APXS instrument head was picture perfect. Images taken by Sojourner's front cameras showing the rock/feature known as "Casper" were exceptional. Sojourner will spend the night on Scooby-Doo collecting several APXS spectra before moving on to her next activity. Newest Rover "Movie" (16 July 1997) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 12 Today the Sojourner traversed from Yogi to a prospective soil experiment site after successfully acquiring a spectrum from Yogi. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 11 Today the Sojourner successfully returned spectral data from the rock dubbed 'Yogi'. The Rover will remain at this vicinity until the quality of the spectrum can be confirmed. The vehicle remains in good health. Newest Rover "Movie" (15 July 1997)! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 10 Today the Sojourner was directed by the Rover Driving/Uplink team to place the Alpha Proton X-ray Spectrometer on the rock dubbed 'Yogi'. This manuever was performed successfully with two of the three APXS contact sensors active indicating a virtual bulls-eye on the target rock. The Rover remains in good health. Tomorrow's downlinked data is hoped to contain the spectral data of 'Yogi' which may possibly yield new information on the geology of Mars. Summary of Planned Rover Activities for Sol 10:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Sol 9 Commands for the next day of activities for Mars Pathfinder were not sent last night because the Pathfinder spacecraft's receiver had not been turned on in advance of the uplink session. NASA's Deep Space Network conducts a routine frequency sweep before uplink sessions each day. The Goldstone, CA station initiated this sweep yesterday at about 1:35 p.m. PDT, when it came online. Because Pathfinder's receiver is only turned on at specific times each day to conserve power, it was not scheduled to be turned on until 1:46 p.m., an 11-minute miscalculation. Therefore the planned command link to the spacecraft was not established. The operations team did not discover the problem until it was ready to begin its downlink session at 9:12 p.m. PDT last night. That 30-minute downlink would have been followed by a later downlink of data at 10:30 p.m. to 12:20 a.m. The lost transmission session did not impact the mission in any way, except to delay the rover and lander activities. The operations team will retransmit the same set of sequences tonight during the 8 p.m. PDT session. Activities planned for today will repeat the tasks not completed yesterday, including backing Sojourner down from Yogi and repositioning its science instrument against the rock. A full color panorama is also planned. Meanwhile, all spacecraft and rover systems are performing well. Today is Sol 8 of the Mars Pathfinder mission. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Newest Rover "movie" (10 July 1997)! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Summary of Planned Rover Activities for Sol 4:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Success!"Six wheels on soil!" The above image was taken by the IMP camera on July 5, 1997. Sojourner's descent down the rear rover deployment ramp was successful. The microrover's seven month journey from Earth to Mars is complete. The soil beneath Sojourner (with tracks showing behind the right rear wheel) will be the first target of the Alpha Proton X-Ray Spectrometer. Animation of the Rover rolling onto the surface of Mars! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
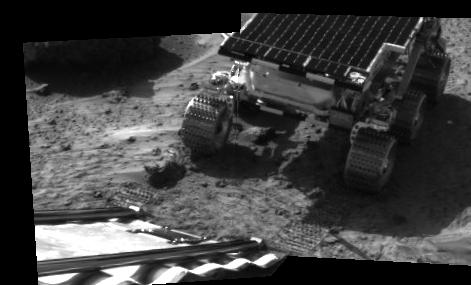
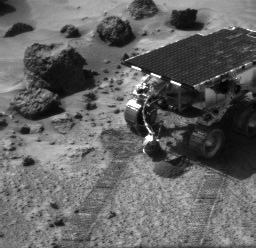
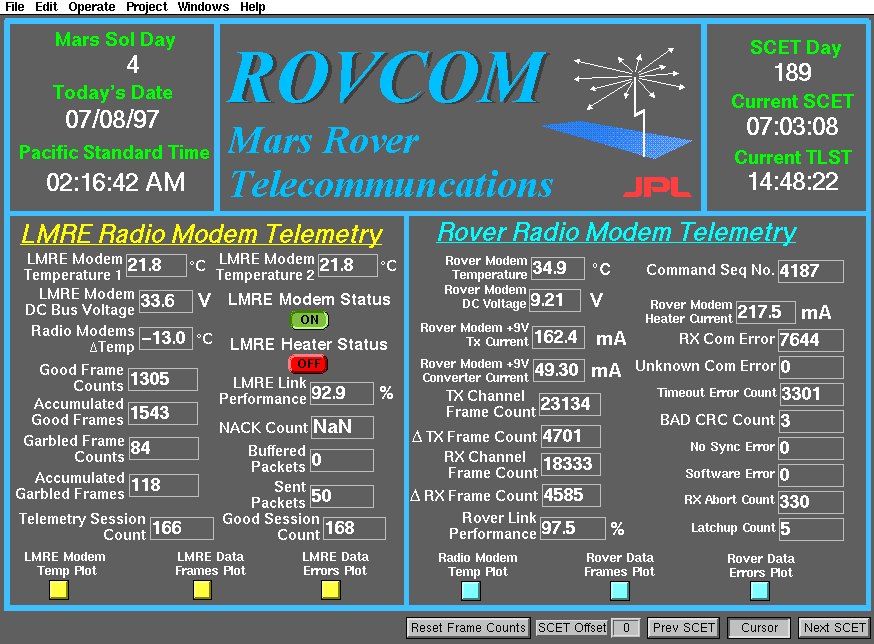
| This is an image taken by the lander's camera of Sojourner on the afternoon of Sol 4. The APXS instrument is clearly shown deployed on the surface. During the night of Sol 4, Sojourner will acquire spectra data from the APXS which will then be used to determine the elemental composition of this particular soil patch. | Rover Telecom display from Sol4 data. The telecom system worked very well on this day and its operating conditions are better understood as compared to earlier Sol's. | This image depicts one of a number graphical displays used to analyze rover engineering data. This particular display shows plots of the internal and external temperatures of the rover starting on the evening of Sol3, throught the night into the morning and afternoon of Sol4. Times are indicated in Mars Local Time. The MAE temperature sensor located on the rovers solar panel gets down to -88.0 C in the early morning before sunrise. It gets colder than the other external temperature sensors because the surface to which it is mounted radiates its heat to the sky (i.e, deep space). With such a thin atmosphere the amount of raditive loss to the sky is much greater than on Earth. The internal temperature fluctuate between 40C and -22C clearly indicating how well the rover's thermal enclosure is working. |
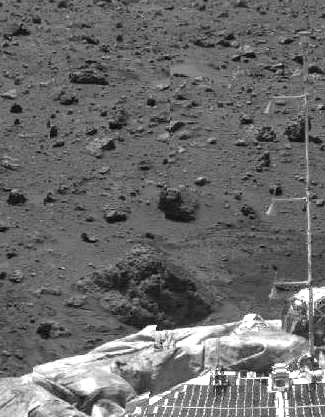
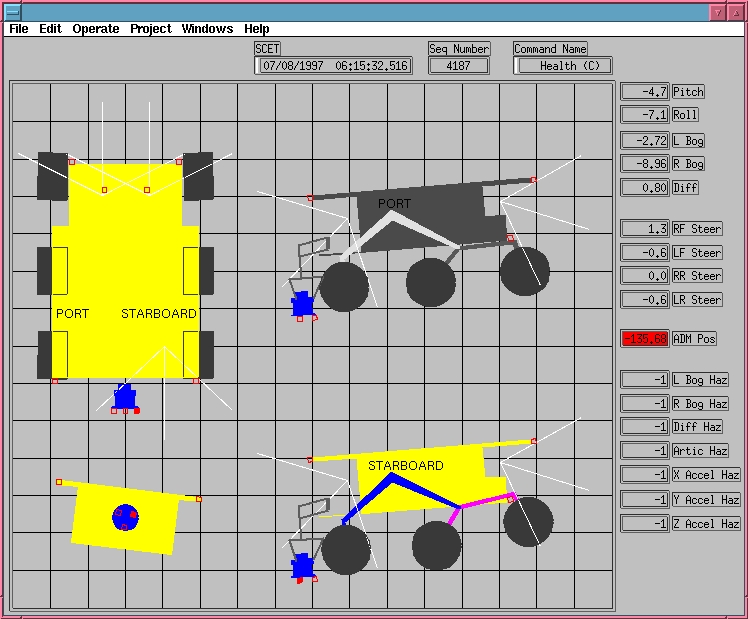
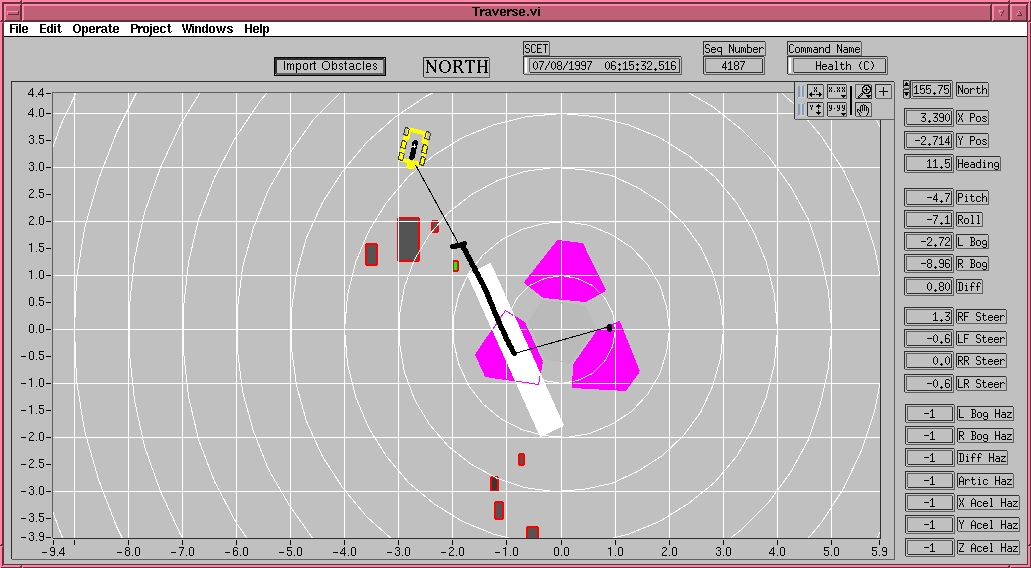
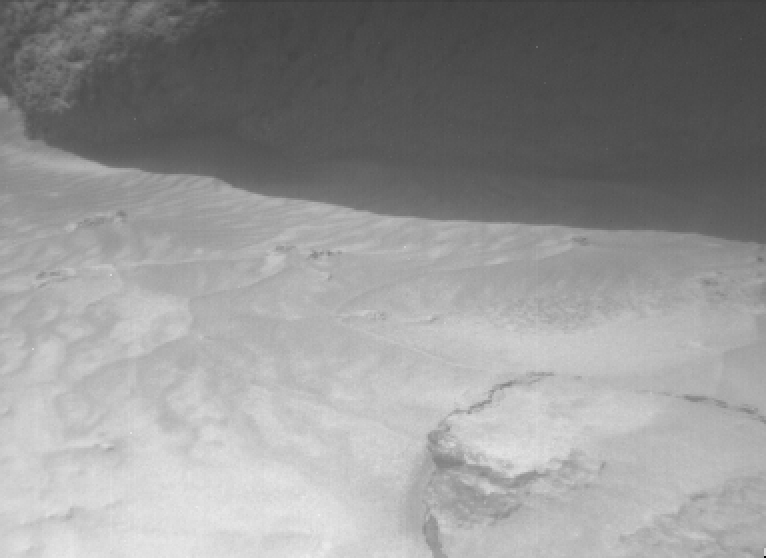
| This image depicts one of a number graphical displays used to analyze rover engineering data. This particular display contains several views of the rover (side, back, plan) in which the position of the rocker arms, bogies, APXS deployment mechanism, and state of the contact sensors is represented based upon the measured telemetry data. The particular configuration show corresponds to the configuration of the rover in the afternoon of Sol 4 after it had deployed the APXS down to the surface in preparation for acquiring soil spectra. The solid red box on the APXS sensor head indicates that it was this contact sensor that detected the presense of the surface when the mechanism was being deployed. The rover is also rolled slightly to the right (by 7.1 degrees) and pitched upward (by 4.7 degrees). The pitch and roll provide information as to the slope and contour of the surface upon which the rover is sitting. | This image depicts one of a number of graphical displays used to analyze rover engineering data. This particular display contains an overhead view of the landing site. The path taken by Sojourner on its way to the rock "Yogi" is depicted. The information contained in this display is based upon the actual telemetry data acquired by Sojourner. The small jog in the middle of the trajectory corresponds to the move that Sojourner made when it approached the rock "Barnacle Bill", simply represented by the larger rectangular object. Mission analysis can zoom in an out of the actual display and play back the actual motion. | This is an image taken by the rover's front right camera of the bottom portion of the rock affectionately called "Yogi". This image was taken on the afternoon of Sol 4. The rover was about 0.5 meters away from the rock when the image was taken. Numerous features on the rock and the soil are clearly visible in the image. The rock in the lower portion of the image was actually disturbed by the rover when it drove up to "Yogi". The upper edge of the rock is clearly visiable whereas in earlier images the soil flowed evenly over the upper portion of this rock. Up-close images of rocks and surface features like this are what the scientists have been longing for and can only be acquired by a vehicle which can navigate to sites of interest. |
Current Science | Mars Pathfinder Home Page |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}