![Telecom Experiments [Image]](images/tcomexpr.gif)
That is the extent of the radio science we can do with this telecommunications subsystem, which was designed to be simple and reliable. Next time we put a microrover on Mars hopefully we'll have much more radio hardware engineering telemetry that will allow us to perform complex telecom experiments and radio science.
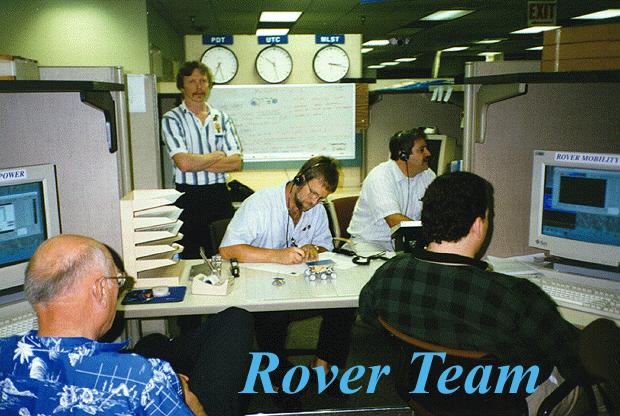
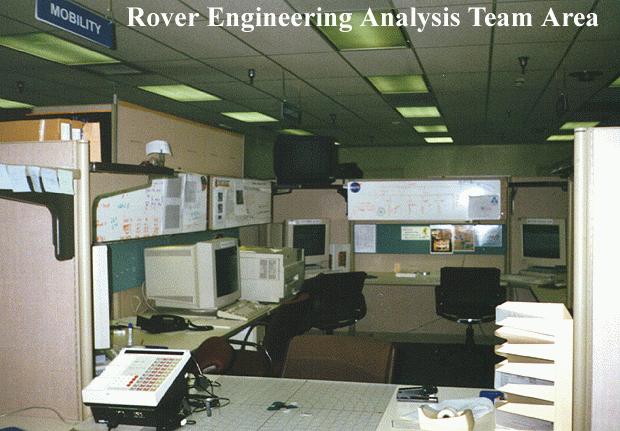
Rover mission operations is performed at JPL in the Space Flight Operations Facility (SFOF building 230). The Rover Engineering Analysis Team (EAT) is comprised of a group of engineers whos job it is to analyze the rover engineering data as it's received during downlinks. The downlinks happen two or more times during a Martian sol while earth is still within view of the lander HGA (High Gain Antenna). Most of the engineers involved in mission operations are those who actually designed, built and tested the rover flight hardware. They were the logical choice for mission operations support since they know the most about the hardware. The different sub-systems represented are Power, Mobility, Control & Navigation, Data Control, Rover Coordination and of course Telecommunications. Analysis of the engineering data is done as soon as it is received, primarily to look for validation of the rover sequence of operations along with any problems we may have encountered. If there are any operational problems they are carefully assessed by the proper sub-system person(s) and an advisement is given on a solution to the data controller and to the Rover test coordinator. At the end of each downlink analysis session a verbal 'GO' or 'NO-GO' is given to the data controller. A 'GO' means to proceed as planned, a 'NO-GO' means that we may not proceed until the problem is resolved. Finally at the end of that day's sequence of rover operations, a written report is created by the data controller and delivered to the Project test conductor and presented to the press. Additionally each rover sub-system creates a written report summarizing that day's activities and analysis.
Below are some images of the Rover Engineering team members and various work areas...
Rover Power Subsystem Engineer
Rover Mobility Engineers
Navigation & Control Engineer
Rover Data Controller
Rover Telecommunications Engineers
Rover Driver 1
Rover Driver 2
Rover Sequence Planner #1
Rover Sequence Planner #2
Rover Coordinators
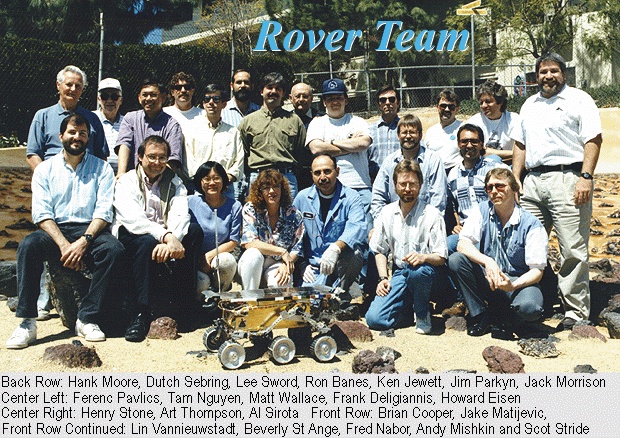
Rover Team Members
More Rover Team Members
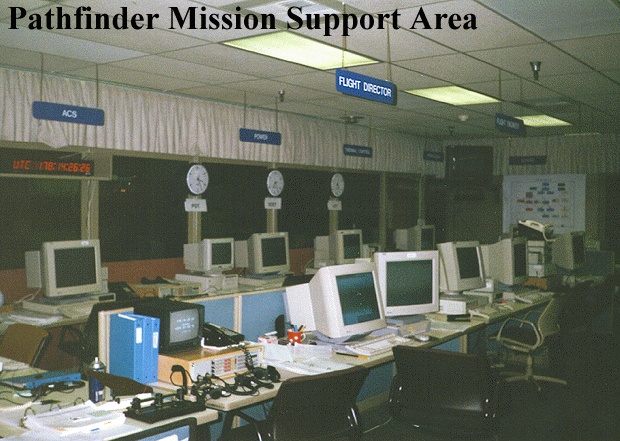
Pathfinder Mission Support Area
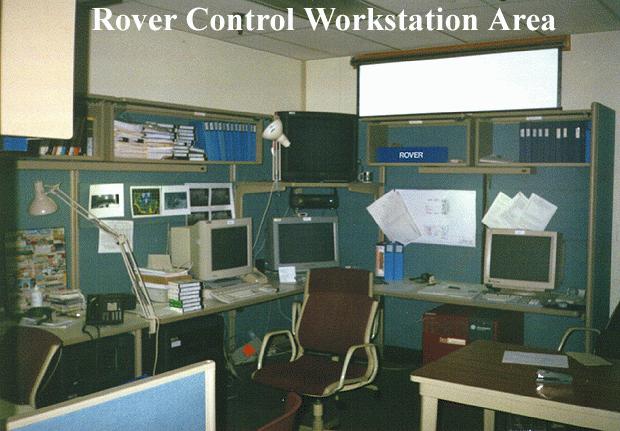
Rover Control Workstation Area
Rover Mission Operations EAT area
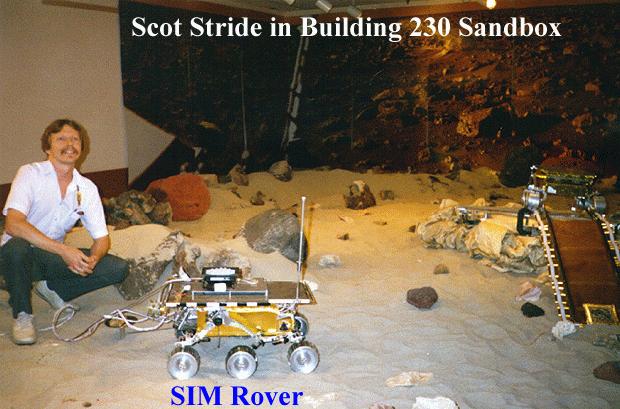
JPL Building 230 Sandbox
JPL Mars Yard
The Microrover Team
For those who are interested, we are providing daily updated engineering telemetry and data plots from the rover telecommunications subsystem. The data for these plots will also be available in Comma Separated Value (CSV) formatted text files. These data files are suitable for import into spreadsheet programs such as QuatroPro* or Excel*. This data is provided 'as is' and is exactly the same as the data received from the microrover or the lander, with no modifications, changes or insidious enhancements. We will *NOT* be providing any rover or lander science data in these web pages. That information will be released to the public through press conferences or through the Mars Pathfinder web page.
This concludes the Telecom Experiments page, click HERE to go to the telemetry page.
![Telecom Team 1-3 [Image]](images/team1-3.jpg)
![Icon]](images/goback2.gif)
![Icon]](images/back2top.gif)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}