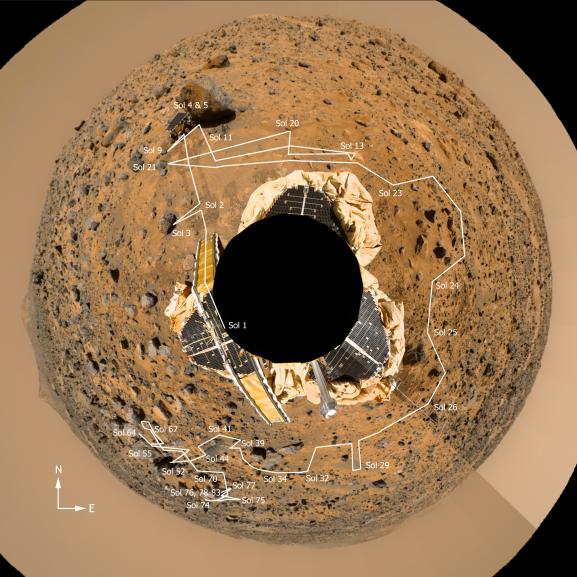
This figure contains an azimuth-elevation projection of the "Gallery Panorama". The original Simple Cylindrical mosaic has been reprojected to the inside of a sphere so that lines of constant azimuth radiate from the center and lines of constant elevation are concentric circles. This projection preserves the resolution of the original panorama. Overlaid onto the projected Martian surface is a delineation of the Sojourner rover traverse path during the 83 Sols (Martian days) of Pathfinder surface operations. The rover path was reproduced using IMP camera "end of day" and "Rover movie" image sequences and rover vehicle telemetry data as references.
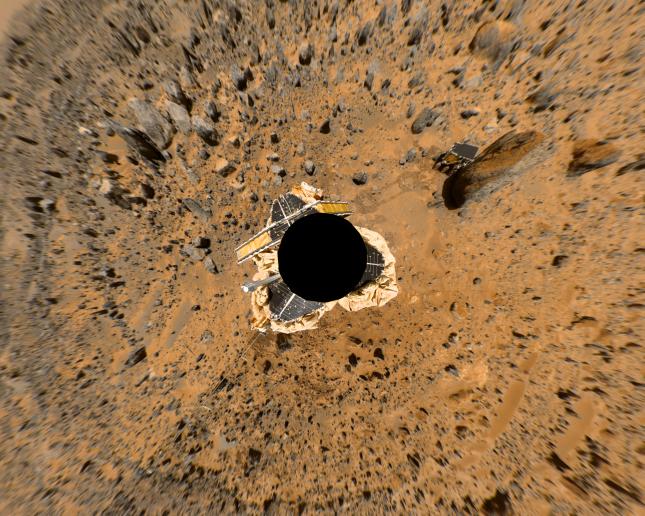
This image is one frame of an animation that was created by using two mosaics: a color image of the Gallery Pan and an image which indicates the distance to the nearest object at each pixel location, referred to as a range image. The range data set is treated as a displacement map with respect to a sphere's surface, and the color image mosaic is draped onto the inside of the sphere. The position of the camera is fixed at the sphere's center, while its viewing direction is in this case looking at the south pole of the sphere. The mosaics were projected onto a continuous cylindrical/perspective coordinate system spanning 360 degrees of azimuth. The distortion visible near the edges of this image is due to the large field of view, as well as the limitation introduced by using cylindrically-projected images on the sphere - the effects of which are less apparent when smaller fields of view are used. The image has been rotated so that the main points of interest, which are the 'Rock Garden', the rover Sojourner and the rock 'Yogi', are easily seen arching across the upper hemisphere. In fixed Mars Surface coordinates, the top of the image looks out towards a point a few degrees north of West. Color has been enhanced to improve contrast in features, and is derived from IMP spectral filters 5, 9 and 0.
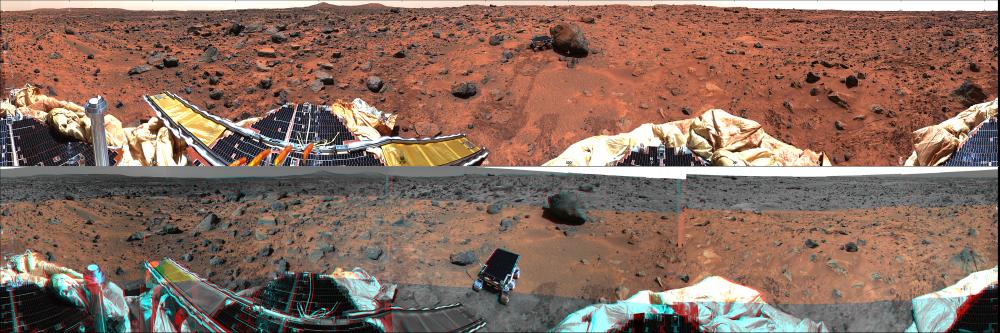
Each of these panoramic views is a controlled mosaic of approximately 300 IMP images covering 360 degrees of azimuth and elevations from approximately 4 degrees above the horizon to 45 degrees below it. Simultaneous adjustment of orientations of all images has been performed to minimize discontinuities between images. Mosaics have been highpass-filtered and contrast-enhanced to improve discrimination of details without distorting relative colors overall.
TOP IMAGE: Enhanced true-color image created from the 'Gallary Pan' sequence, acquired on sols 8-10 so that local solar time increases nearly continuously from about 10:00 at the right edge to about 12:00 at the left. Mosaics of images obtained by the right camera through 670 nm, 530 nm, and 440 nm filters were used as red, green and blue channels. Grid ticks indicate azimuth clockwise from north in 30 degree increments and elevation in 15 degree increments.
BOTTOM IMAGE: Anaglyphic stereoimage created from the 'monster pan' sequence, acquired in four sections between about 8:30 and 15:00 local solar time on sol 3. Mosaics of images obtained through the 670 nm filter (left camera) and 530 and 440 nm filters (right camera) were used where available. At the top and bottom, left- and right-camera 670 nm images were used. Part of the northern horizon was not imaged because of the tilt of the lander. This image may be viewed stereoscopically through glasses with a red filter for the left eye and a cyan filter for the right eye.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 1)
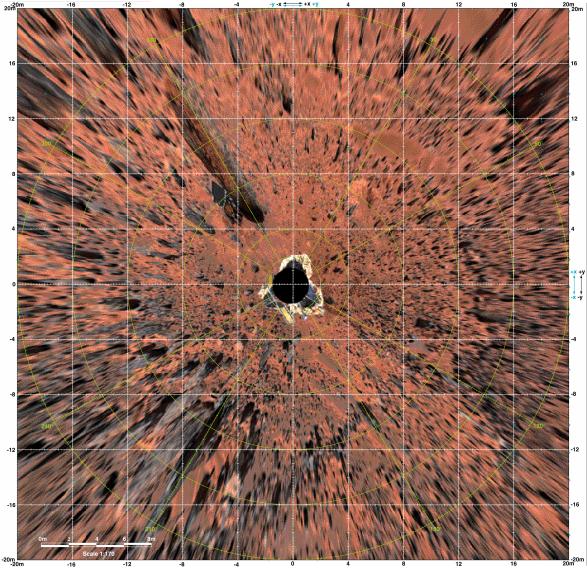
Planimetric (overhead view) map of the landing site, to a distance of 20 meters from the spacecraft. North is at the top in this and Plates 3-5. To produce this map, images were geometrically projected onto an assumed mean surface representing the ground. Features above the ground plane (primarily rocks) therefore appear displaced radially outward; the amount of distortion increases systematically with distance. The upper surfaces of the lander and rover also appear enlarged and displaced because of their height. Primary grid (white) is based on the Landing Site Cartographic (LSC) coordinate system, defined with X eastward, Y north, and Z up, and origin located at the mean ground surface immediately beneath the deployed position of the IMP camera gimbal center. Secondary ticks (cyan) are based on the Mars local level (LL) frame, which has X north, Y east, Z down, with origin in the center of the lander baseplate. Rover positions (including APXS measurements) are commonly reported in the LL frame. Yellow grid shows polar coordinates based on the LSC system. Cartographic image processing by U.S. Geological Survey.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 2)
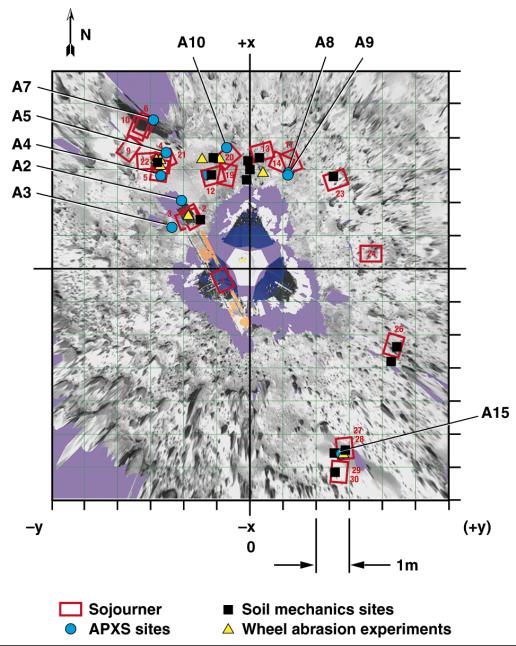
Overhead view of the area surrounding the Pathfinder lander illustrating the Sojourner traverse. Red rectangles are rover positions at the end of sols 1-30. Locations of soil mechanics experiments, wheel abrasion experiments, and APXS measurements are shown. The A numbers refer to APXS measurements as discussed in the paper by Rieder et al. (p. 1770, Science Magazine, see image note). Coordinates are given in the LL frame.
The photorealistic, interactive, three- dimensional virtual reality (VR) terrain models were created from IMP images using a software package developed for Pathfinder by C. Stoker et al. as a participating science project. By matching features in the left and right camera, an automated machine vision algorithm produced dense range maps of the near field, which were projected into a three- dimensional model as a connected polygonal mesh. Distance and angle measurements can be made on features viewed in the model using a mouse- driven three-dimensional cursor and a point-and-click interface. The VR model also incorporates graphical representations of the lander and rover and the sequence and spatial locations at which rover data were taken. As the rover moved, graphical models of the rover were added for each position that could be uniquely determined using stereo images of the rover taken by the IMP. Images taken by the rover were projected into the model as two-dimensional 'billboards' to show the proper perspective of these images.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 3)
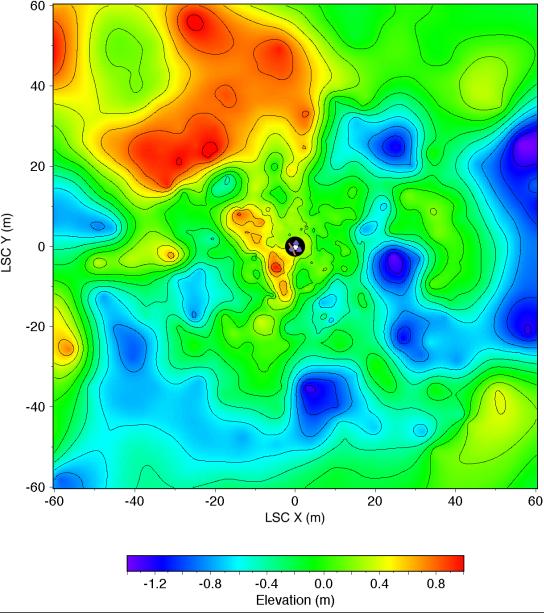
Topographic map of the landing site, to a distance of 60 meters from the lander in the LSC coordinate system. The lander is shown schematically in the center; 2.5 meter radius circle (black) centered on the camera was not mapped. Gentle relief [root mean square (rms) elevation variation 0.5 m; rms adirectional slope 4O] and organization of topography into northwest and northeast-trending ridges about 20 meters apart are apparent. Roughly 30% of the illustrated area is hidden from the camera behind these ridges. Contours (0.2m interval) and color coding of elevations were generated from a digital terrain model, which was interpolated by kriging from approximately 700 measured points. Angular and parallax point coordinates were measured manually on a large (5m length) anaglyphic uncontrolled mosaic and used to calculate Cartesian (LSC) coordinates. Errors in azimuth on the order of 1O are therefore likely; elevation errors were minimized by referencing elevations to the local horizon. The uncertainty in range measurements increases quadratically with range. Given a measurement error of 1/2 pixel, the expected precision in range is ~ 0.3 meter at 10 meter range, and ~ 10 meters at 60 meter range. Repeated measurements were made, compared, and edited for consistency to improve the range precision. Systematic errors undoubtedly remain and will be corrected in future maps compiled digitally from geometrically controlled images. Cartographic processing by U.S. Geological Survey.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 4)

Mars-local-level (LL frame) coordinate map of rocks counted at the Mars Pathfinder landing site. Positions, apparent diameters (D), and heights (H) were measured to the nearest centimeter in the Marsmap virtual reality environment constructed from the "Monster Pan"
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 6)
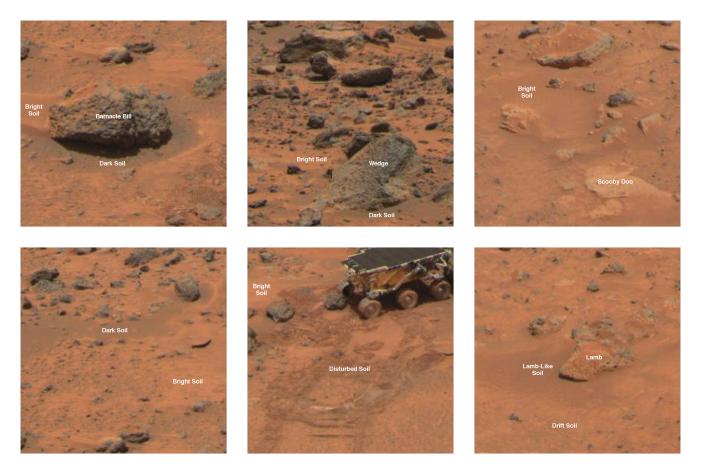
Type areas of rocks and soils. (A) Dark rock type and bright soil type: Shown is the dark rock Barnacle Bill. Reflectance spectra typical of fresh basalt and APXS spectra indicating more silica- rich basaltic andesite compositions characterize this type. These rocks are typically the small boulders and intermediate-sized cobbles at the Pathfinder site. The bright soil type is very common and in this case comprises Barnacle Bill's wind tail and much of the surround soil area. This soil has a high reflectance and a strongly reddened spectrum indicative of oxidized ferric minerals. (B) Bright rock type: Shown is the bright rock Wedge. Reflectance spectra typical of weathered basalt and APXS spectra indicating basaltic compositions characterize this type. These rocks are typically larger than 1 meter in diameter and many display morphologies indicating flood deposition. (C) Pink rock type: Shown is the pink rock Scooby Doo. APXS and reflectance spectra indicate a composition and optical characteristics similar to the drift soil. However, the morphology of the pink rock type indicates a cemented or rocklike structure. This material may be a chemically cemented hardpan that underlies much of the Pathfinder site. (D) Dark soil type: The dark soil type is typically found on the windward sides of rocks or in rock- free areas like Photometry Flats (shown here) where the bright soil has been striped away by aeolian action or in open areas. Other locations include the Mermaid Dune. (E) Disturbed soil type: The darkening of disturbed soil relative to its parent material, bright soil, as a result of changes in soil texture and compaction caused by movement of the rover and retraction of the lander airbag. (F) Lamb-like soil type: This soil type shows reflectance and spectral characteristics intermediate between the bright and dark soils. Its distinguishing feature is a weak spectral absorption near 900 nanometers not seen in either the bright or dark soils.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Mars Pathfinder Foldout' (Plate 7)
Based on the first direct measurements ever obtained of Martian rocks and terrain, scientists on NASA's Mars Pathfinder mission report in this week's Science magazine that the red planet may have once been much more like Earth, with liquid water streaming through channels and nourishing a much thicker atmosphere.
Among the more significant discoveries of the Mars Pathfinder mission was the identification of possible conglomerate rocks, which suggests the presence of running water to smooth and round the pebbles and cobbles, and deposit them in a sand or clay matrix, says Dr. Matthew Golombek, Mars Pathfinder project scientist at NASA's Jet Propulsion Laboratory, Pasadena, CA. This scenario supports the theory that Mars was once warmer and wetter.
'If you consider all of the evidence we have at Ares Vallis -- the rounded pebbles and cobbles and the possible conglomerate, the abundant sand- and dust-sized particles and models for their origins, in addition to the high silica rocks,' Golombek says, 'it suggests a water-rich planet that may have been more Earth- like than previously recognized, with a warmer and wetter past in which liquid water was stable and the atmosphere was thicker.'
A panoramic view of Pathfinder's Ares Vallis landing site, featured on the cover of the Dec. 5 issue of Science, reveals traces of this warmer, wetter past, showing a flood plain covered with a variety of rock types, boulders, rounded and semi-rounded cobbles and pebbles. These rocks and pebbles are thought to have been swept down and deposited by floods which occurred early in Mars' evolution in the Ares and Tiu regions near the Pathfinder landing site.
The cover image, which is a 75-frame, color-enhanced mosaic taken by the Imager for Mars Pathfinder, looks to the southwest toward the Rock Garden, a cluster of large, angular rocks tilted in a downstream direction from the floods. The image shows the Pathfinder rover, Sojourner, snuggled against a rock nicknamed Moe. The south peak of two hills, known as Twin Peaks, can be seen on the horizon, about 1 kilometer (6/10ths of a mile) from the lander. The rocky surface is comprised of materials washed down from the highlands and deposited in this ancient outflow channel by a catastrophic flood.
'Before the Pathfinder mission, knowledge of the kinds of rocks present on Mars was based mostly on the Martian meteorites found on Earth, which are all igneous rocks rich in magnesium and iron and relatively low in silica,' Golombek and a team of Pathfinder scientists report in a paper entitled, 'Overview of the Mars Pathfinder Mission and Assessment of Landing Site Predictions.' The paper summarizes the scientific results of the mission, which are also detailed in six other papers in this issue. The scientists report that chemical analyses of more than 16 rocks and studies of different regions of soil -- along with spectral imaging of rock colors, textures and structures -- have confirmed that these rocks have compositions distinct from those of the Martian meteorites found on Earth.
'The rocks that were analyzed by the rover's alpha proton X- ray spectrometer were basaltic or volcanic rocks, with granite- like origins, known as andesitic rocks,' Golombek reports. 'The high silica or quartz content of some rocks suggests that they were formed as the crust of Mars was being recycled, or cooled and heated up, by the underlying mantle. Analyses of rocks with lower silica content appear to be rich in sulfur, implying that they are covered with dust or weathered. Rover images show that some rocks appear to have small air sacks or cavities, which would indicate that they may be volcanic. In addition, the soils are chemically distinct from the rocks measured at the landing site.'
The remarkably successful Mars Pathfinder spacecraft, part of NASA's Discovery program of fast track, low-cost missions with highly focused science objectives, was the first spacecraft to explore Mars in more than 20 years. In all, during its three months of operations, the mission returned about 2.6 gigabits of data, which included more than 16,000 images of the Martian landscape from the lander camera, 550 images from the rover and about 8.5 million temperature, pressure and wind measurements.
The rover traveled a total of about 100 meters (328 feet) in 230 commanded maneuvers, performed more than 16 chemical analyses of rocks and soil, carried out soil mechanics and technology experiments, and explored about 250 square meters (820 square feet) of the Martian surface. The flight team lost communication with the lander on Sept. 27, after 83 days of daily commanding and data return. In all, the lander operated nearly three times its design lifetime of 30 days, and the small, 10.5 kilogram (23- pound) rover operated 12 times its design lifetime of seven days. < P> Now known as the Sagan Memorial Station, the Mars Pathfinder mission was designed primarily to demonstrate a low-cost way of delivering a set of science instruments and a free-ranging rover to the surface of the red planet. Landers and rovers of the future will share the heritage of spacecraft designs and technologies first tested in this "pathfinding
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997,(cover)
updated caption submitted by: Jet Propulsion Laboratory (Press Release #97112, Dec. 1, 1997)

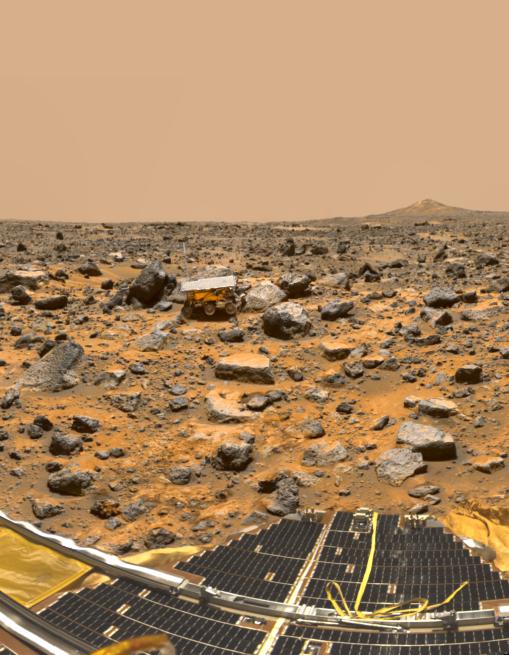
Image of Pathfinder Lander on Mars taken from Sojourner Rover left front camera on sol 33. The IMP (on the lattice mast) is looking at the rover. Airbags are prominent, and the meteorology mast is shown to the right. Lowermost rock is Ender, with Hassock behind it and Yogi on the other side of the lander.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Overview of the Mars Pathfinder Mission and Assessment of Landing Site Predictions' (Fig. 2)
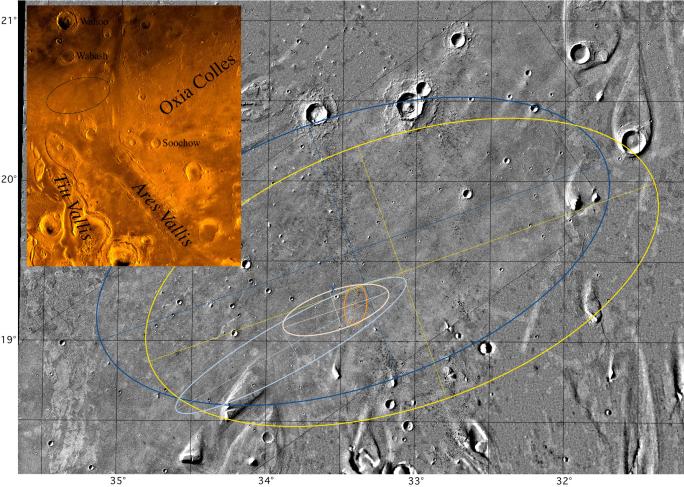
Mosaic of Ares Vallis showing different landing ellipses, with color inset of the Chryse Planitia region of Mars showing the outflow channels. The large blue ellipse (100 km by 200 km) to the northwest is an ellipse in the USGS cartographic reference frame designed to avoid streamlined hills to the south and east, craters to the north, and etched terrain to the west (this ellipse is shown in the color inset). The large yellow ellipse (100 km by 200 km) displaced toward the southeast (by 20 km in longitude and 8 km in latitude) is the navigation target ellipse in the revised local cartographic reference frame (which are the latitude and longitude shown in this figure). The elongate light blue ellipse (98 km by 19 km) is the navigation prediction as of late 3 July and early 4 July; it includes part of the streamlined island in the southwest. The gold ellipse (15 km by 8 km) is the prediction with tracking through atmospheric entry. The pink ellipse (41 km by 15 km), which encloses the smallest ellipse (and the location of the lander), is the navigation result with dispersions added for atmospheric entry and descent. The blue X is the location of the lander with respect to surface features identified in Viking orbiter images(located at 19.33 degrees N, 33.55 degrees W in the local reference frame). The location of the lander in inertial space (19.30 degrees N, 33.52 degrees W) from the two-way ranging and Doppler tracking of the lander is at the very northwest edge of the crater, just 2.2 km to the south-southeast of the X. If the location of the lander in inertial space is forced to coincide with its location with respect to surface features, then the resulting cartographic frame is actually 2 km to the south and 0.8 km to the east of the local network. Color mosaic is part of the Oxia Palus Quadrangle (MC 11) of Mars; black and white mosaic from Viking orbiter images of 38 m/pixel resolution; north is at the top.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Overview of the Mars Pathfinder Mission and Assessment of Landing Site Predictions' (Fig. 4)
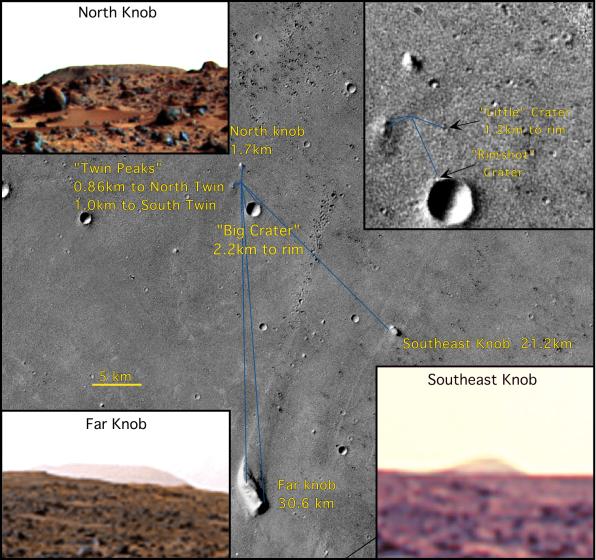
Mosaic of Viking orbiter images illustrating the location of the lander (19.17 degrees N, 33.21 degrees W in the USGS reference frame) with respect to surface features. Five prominent features on the horizon include North Knob, Southeast Knob, Far Knob, Twin Peaks, and Big Crater. Two small craters visible in the orbiter and lander views--Little Crater and Rimshot Crater--lie on the northwest outer flank of the rim of Big Crater. Because the lander is on the southeast-facing flank of a low ridge, very distant features to the south and east are in view, whereas relatively nearby features to the north are partially or completely obscured. Only the tip of North Knob, which appears larger in the Viking orbiter images than the Twin Peaks, projects above the local horizon, and a 300-m crater, 1.2 km to the northeast, is completely obscured. Viking stereo images 004A27 and 004A87 and 004A44 and 004A70. North is up; scale bar, 5 km. (Insets) (Upper right) Lander location. (Upper left) North Knob from lander. (Lower left) Far Knob from lander. (Lower right) Southeast Knob from lander. The location of the lander in inertial space (19.30 degrees N, 33.52degrees W) from the two- way ranging and Doppler tracking of the lander is coincident with Rimshot Crater.
NOTE: original caption as published in Science Magazine
Image Note: Science Magazine, Volume 278, Number 5344, 5 December 1997, 'Overview of the Mars Pathfinder Mission and Assessment of Landing Site Predictions' (Fig. 5)